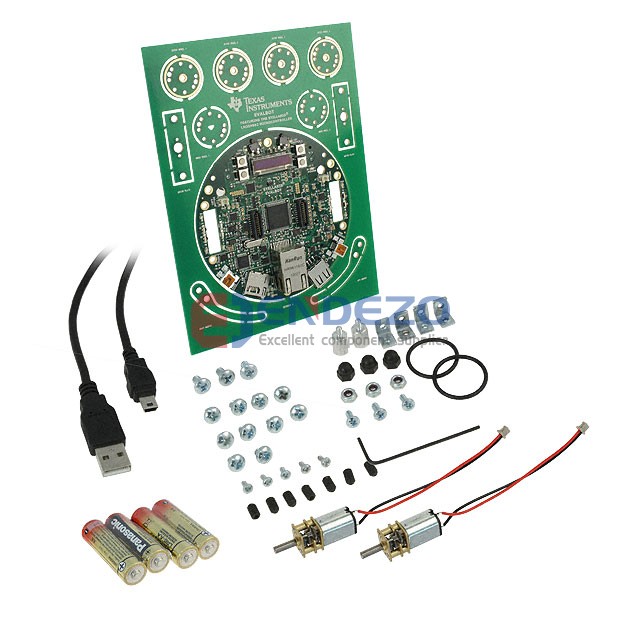
Aufbau: Robot Components, Verwendeter IC / Teil: LM3S9B92, Inhalt: Board(s), Cable(s), Components, Hardware, Wheel(s),
Aufbau: Wheeled, Verwendeter IC / Teil: 5CSEBA6U23I7, Enthaltene MCU/MPU-Board(s): DE10-Nano, Inhalt: Fully Assembled,
Aufbau: Wheeled, Verwendeter IC / Teil: EP4CE22F17C6N, Inhalt: Fully Assembled,
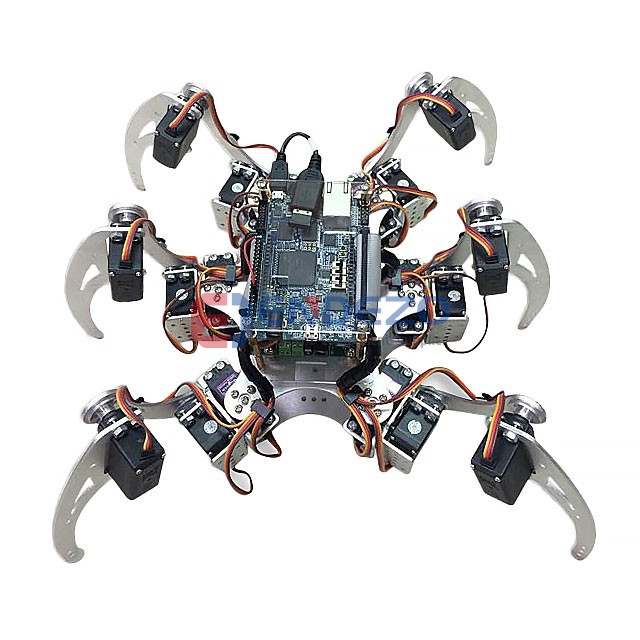
Aufbau: Spider, Verwendeter IC / Teil: 5CSEMA4U23C6N, Inhalt: Fully Assembled,
Aufbau: Gripper, Channel Mount, Inhalt: Standard Gripper Kit A (Motor Not Included),
Aufbau: Wheeled, Verwendeter IC / Teil: DRV8835, CY8C4245LQI, Verbindungssystem: micro:bit, Empfohlene Programmierumgebung: Microsoft MakeCode, Python, Inhalt: Board(s), Chassis, Components, Hardware, Motor(s), Servo(s), Wheel(s),
Aufbau: Pan/Tilt, Inhalt: Bracket(s), Hardware, Servo(s),